

팜테크(FAMTECH)
[ReXgen]Analog, Digital In, IMU 및 GPS 데이터를 CAN0 port 출력 후 Rebel에서 확인 실습 본문
[ReXgen]Analog, Digital In, IMU 및 GPS 데이터를 CAN0 port 출력 후 Rebel에서 확인 실습
FAMTECH 2025. 3. 19. 08:30
목차

"관련제품 문의는 로고 클릭 또는 공지사항의 연락처를 통해 하실 수 있습니다."
Reference>> ReXgen2 를 사용하여 CAN 데이터를 로깅하고 출력하기 위한 설정법 (팜테크 정훈형)
(1) 장비 구성

- ReXgen2 IMU + GPS
- Rebel CT
- Kvaser
- Multi Connect Cable
장비 연결 및 실행 순서 요약 (설정이 완료된 XML 사용)
- ReXgen2와 PC 연결
- USB 케이블을 사용하여 ReXgen2 ↔ PC 연결
- ReXdesk 실행 및 프로젝트 열기
- ReXdesk 실행
- Open Project → GNSS2CAN_SD_ALL.xml 선택
- 설정 실행
- Config → Run → Run Config Using External File 선택
- GNSS2CAN_SD_ALL.xml 선택 후 Configuration Uploaded Successfully 확인
- 실시간 데이터 확인
- Projects 항목에서 GNSS2CAN_SD_ALL.xml 선택
- Live → Online 선택
- 가속도, 자이로, GPS 데이터가 실시간으로 변경됨 확인
- GPS 데이터가 나타날 때까지 대기 (날씨 상태에 따라 몇 분 소요될 수 있음)
- ReXgen2 독립 실행
- USB 케이블 제거 (ReXgen2 ↔ PC)
- ReXgen2 외부 전원 연결 (CANFD0의 녹색 LED 깜빡임 확인)
- 별도 CAN 저장 장치 연결 시 녹색 LED 멈춤
XML 편집 시 주의 사항
- Periodic Messages 설정 시 UID 번호 충돌 방지
- Add 순서에 따라 Ident(0x128=296) 와 매칭되는 UID 번호가 변경됨
- XML에서 설정을 복사할 경우 모든 UID 번호가 중복되지 않도록 확인 필수
- CANSIGNAL_LIST 매칭 확인
- ReXdesk에서 설정한 채널 개수 및 순서에 따라
- InputUID, MessageUID가 변경됨
- 올바른 재매칭 필수
- ReXdesk에서 설정한 채널 개수 및 순서에 따라
(2) CAN0 출력 설정 및 로깅

ReXgen2의 설정 과정에서 요구되는 채널 입출력 설정은 다음과 같습니다.
우선, Configuration(구성) 단계에서는 필요한 채널을 올바르게 설정해야 합니다.
Logging(로그 설정) 단계에서는 CAN0 채널에 ‘Log All’ 옵션을 추가하여 모든 CAN 데이터를 기록할 수 있도록 합니다. 또한, Channels 항목에는 Accel(가속도), Gyro(자이로), GNSS(GPS), Dig In(디지털 입력), Analog(아날로그 입력) 채널을 추가합니다. 단, Dig In과 Analog 채널은 별도로 설정이 필요합니다.
다음으로, Transmitting(데이터 전송) 설정에서는 Output 항목에 Periodic(주기적 전송) 옵션을 추가하여 데이터가 정해진 간격으로 전송되도록 설정해야 합니다.

Periodic Messages(주기적 메시지) 설정 과정에서는 출력 채널을 올바르게 구성해야 합니다.
먼저, 출력할 채널을 추가(Add)하는 과정에서, Tx Ident 값으로 0x128, 0x129, 0x12A, 0x12B, 0x12C, 0x12D, 0x12E, 0x12F 등을 입력합니다. 이 값들은 요구되는 채널에 따라 적절히 지정됩니다.
그다음, Period(주기) 값으로 모든 항목에 ‘100’을 입력하여, 데이터가 100ms 간격으로 주기적으로 전송되도록 설정합니다.
마지막으로, CAN0 채널에서 모든 메시지에 체크(√)하여, 설정된 모든 메시지가 CAN0 채널을 통해 전송될 수 있도록 구성합니다.
이와 같은 설정을 통해 ReXgen2는 주기적으로 데이터를 CAN 네트워크에 전송하게 됩니다.

Config > Run > Run Config 를 실행합니다.

그림과 같이 실행합니다.

위와 같이 dbc 파일을 업로드 합니다.

위와 같이 csv 파일로 데이터를 저장합니다.
(3) XML 편집 및 Run

ReXgen2 : 설정 저장
Config > Export > Export Configuration to XML > GNSS2CAN_SD_ALL.xml 저장

GNSS2CAN_SD_ALL.xml 파일의 CAN0 출력 설정 편집 과정에서는 CANMESSAGE_LIST 항목을 수정해야 합니다.
우선, CANMESSAGE_LIST를 편집할 때 UID 번호, MessageIdenStart 및 MessageIdenEnd 값을 확인하는 것이 중요합니다.
특히, MessageIdenStart 및 MessageIdenEnd 값은 "Periodic Messages" 설정에서 추가한 Tx Ident 값과 정확히 일치해야 합니다. 즉, 올바르게 매칭되지 않으면 데이터 전송이 정상적으로 이루어지지 않을 수 있습니다.
예를 들어, 다음과 같이 Tx Ident 값과 Message ID가 일치하도록 설정해야 합니다.
- 296 = 0x128
- 297 = 0x129
- 298 = 0x12A
- 299 = 0x12B
- 300 = 0x12C
- 301 = 0x12D
- 302 = 0x12E
- 303 = 0x12F
이와 같은 설정을 통해 CAN0 채널에서 원하는 데이터를 정확하게 송출할 수 있도록 구성됩니다.

CANSIGNAL_LIST 편집 과정에서는 각 신호의 입력과 메시지 매칭을 정확히 설정해야 합니다.
먼저, Input UID 값은 각 센서 및 입력 채널 리스트에 따라 적절히 설정해야 합니다.
이 값은 다음과 같이 매칭됩니다.
- ACCELEROMETER_LIST(가속도 데이터)
- GYRO_LIST(자이로 데이터)
- GNSSMESSAGE_LIST(GNSS/GPS 데이터)
- ADC_LIST(아날로그 입력 데이터)
- DIGITAL_INPUT_LIST(디지털 입력 데이터)
각 리스트에서 UID 값을 확인한 후, Input UID가 올바르게 연결되었는지 검토하는 것이 중요합니다.
또한, MessageUID 값은 CANMESSAGE_LIST의 UID 값과 일치해야 합니다.
즉, CAN 신호가 올바르게 송출되기 위해 각 신호의 Input UID와 MessageUID가 정확히 매칭되어야 합니다.
이와 같은 설정을 통해 센서 및 입력 장치에서 측정된 데이터가 올바르게 CAN 메시지로 변환되고, 지정된 주기로 송출될 수 있도록 구성됩니다.


CAN0 출력을 위해서는 CANSIGNAL_LIST에 GPS Longitude 채널을 추가해야 합니다.
이때, "Periodic Messages"에서 추가된 Tx Ident의 순서와 "CANMESSAGE_LIST" 하위 CANMESSAGE 폴더의 순서는 동일하게 유지되어야 합니다. 예를 들어, Tx Ident가 5번째로 추가되었다면, "CANMESSAGE_LIST" 내에서 해당 메시지를 포함하는 CANMESSAGE 폴더도 5번째 순서가 되어야 합니다.
Tx Ident 값이 0x12C로 설정된 경우, MessageIdentStart 값은 300과 매칭됩니다. 따라서, 5번째 CANMESSAGE 폴더의 UID 값이 37임을 확인해야 합니다.
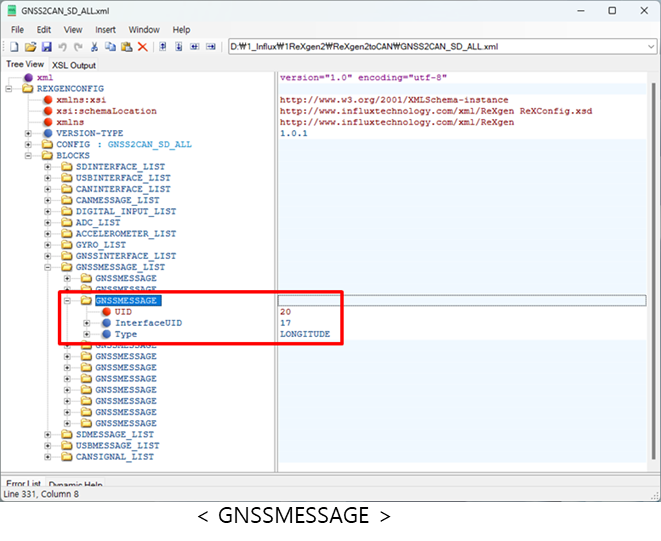
다음으로, "GNSSMESSAGE_LIST"에서 GPS Longitude 데이터가 포함된 GNSSMESSAGE 폴더를 찾습니다.
여기서, "Type: LONGITUDE"에 해당하는 UID 값이 20임을 확인합니다.
이후, "CANSIGNAL_LIST"에 새로운 CANSIGNAL 폴더를 추가하고,
- InputUID = 20 (GNSSMESSAGE_LIST에서 가져온 UID 값)
- MessageUID = 37 (CANMESSAGE_LIST에서 가져온 UID 값)
으로 설정합니다.
새로운 CANSIGNAL 폴더를 추가하는 방법은,
- 기존 CANSIGNAL 폴더 중 하나를 복사
- "CANSIGNAL_LIST"에 붙여넣기
- UID, InputUID, MessageUID, Name 값을 적절히 수정
이와 같은 방식으로, CAN0 출력을 원하는 다른 채널도 "CANSIGNAL_LIST"에 추가할 수 있습니다. 단, 새롭게 추가되는 채널 수에 따라 UID 번호가 달라질 수 있으므로, UID 중복이 발생하지 않도록 주의해야 합니다.
이러한 과정을 거치면, GNSS Longitude 데이터가 올바르게 CAN0으로 출력될 수 있도록 설정할 수 있습니다.

ReXgen2 : xml 을 사용해서 장비 실행합니다.
Config > Run > Run Config Using External File > GNSS2CAN_SD_ALL.xml 선택
(4) CAN0 출력 확인 및 Rebel Series 설정

DiaLog5.3 : CAN0 출력 확인용
New Project > New Configuration: CAN0(HS) > New Module > New Protocol: CANMonitor
> Load DBC File: ReXgen_IMU_Out_V3.dbc 선택 > 오른쪽 CAN 채널 리스트를 왼쪽으로 가져오기

로거에 설정 저장하기
Project 리스트 우클릭 > Send Configuration to the Logger

채널 선택 및 실시간 데이터 스트리밍
Active Configuration : 체크박스를 모두 체크해서 채널 선택
Start logging 클릭: 녹색(stop) 선택 > 붉은색(logging) > 실시간 Time signal 확인

데이터 저장
Rebel Explorer > Project name 선택 > 파일 선택 우클릭 > Show file(s) in Oscilloscope > 데이터 저장 및 그래프 확인
설정 파일 다운로드(DBC, XML)
해당 내용과 관련해서 팜테크에서 시스템 솔루션을 제공하고 있습니다. 관심 있으시면 아래 홈페이지 또는 연락처를 통해 문의 주시면 됩니다. :)
https://famtech.co.kr/sub04/01_01.php
팜테크
진동센서, 진동시험기, 충격시험기, 쉐이커, 소음측정, 내구성 해석, Data Acquisition 취급. 팜테크
famtech.co.kr




