

팜테크(FAMTECH)
[ReXgen] CAN Port0에서 1로 Gateway 실습 + IMU 신호 추가(캔통신, 필터링, Filtering, CAN Bus, Gyro, Acceleration, Bypass) 본문
[ReXgen] CAN Port0에서 1로 Gateway 실습 + IMU 신호 추가(캔통신, 필터링, Filtering, CAN Bus, Gyro, Acceleration, Bypass)
FAMTECH 2024. 6. 24. 11:05
목차

"관련제품 문의는 로고 클릭 또는 공지사항의 연락처를 통해 하실 수 있습니다."
CAN Port0에서 1로 Gateway 실습 목적 및 구성

이번 실습은 ReXgen2 CAN 데이터 로거 장치를 이용한 실습입니다. ReXgen2는 총 2개의 CAN 포트로 구성되어 있으며, 각 포트는 CAN 2.0 또는 CAN FD 버스를 지원합니다. 또한, ReXgen2는 2개의 디지털 I/O 채널과 2개의 아날로그 입력 채널을 제공하여 정확하고 안전하며 신뢰할 수 있는 데이터 컴퓨팅을 보장합니다.
실습 목표
이 실습의 목표는 Port0으로 들어오는 CAN 신호를 필터링하여 Port1으로 전송하는 방법을 배우는 것입니다. 또한, ReXgen2에 내장된 다양한 신호를 CAN 통신으로 변환하여 Port0의 CAN 메시지와 함께 Port1으로 전송하는 방법도 학습합니다.
이번 실습을 통해 ReXgen2의 CAN 데이터 로거 기능을 활용하여 원하는 CAN 정보를 필터링하고, 변환된 신호를 포함하여 다른 포트로 전송하는 방법을 익히게 됩니다. 이를 통해 실제 자동차 데이터 컴퓨팅에서의 활용 방안을 이해할 수 있을 것입니다.
실습 구성

- 3번: Influx TC Logger 장치로 측정한 온도 값을 CAN Signal로 출력 합니다.
- 2번: ReXgen2로 Port1번에서 들어온 온도 값을 Port2로 보내 줍니다.두번 째 실습에서는 온도 값에 IMU를 추가한 신호를 전송합니다.
- 1번: ReXgen2로 2번 ReXgen2에서 Port1로 보낸 신호를 Port1을 통해 로깅합니다. USB를 컴퓨터와 연결해서 실시간으로 결과 값을 확인 합니다.
CAN Port0에서 1로 Gateway 실습 순서
1. 실습 구성 그림에서 2번 ReXgen2의 프로 그램을 진행합니다. UDB를 2번 ReXgen2에 연결을 하고 ReXdesk 소프트웨어를 실행합니다.
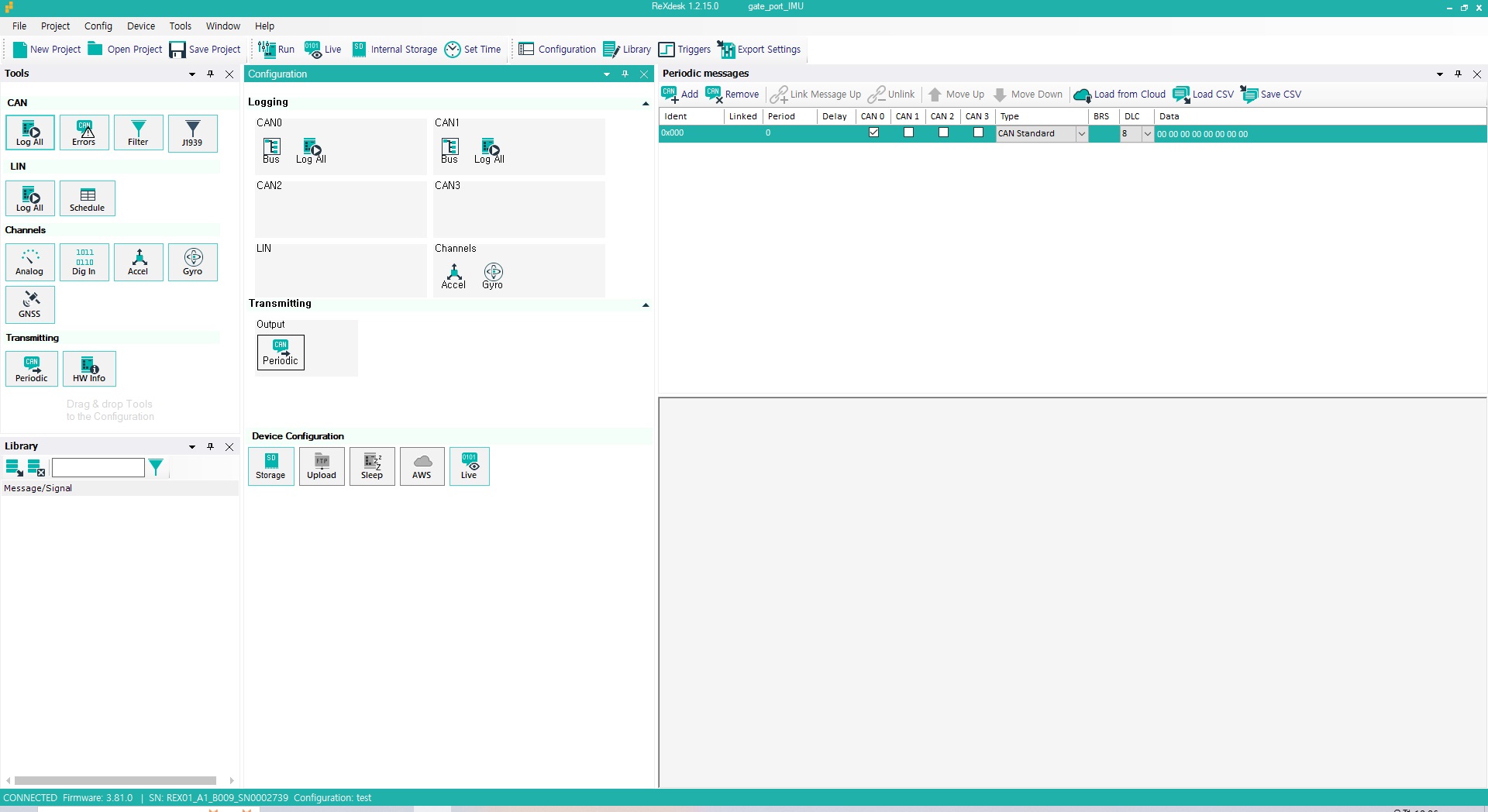
아래와 같이 CAN0, CAN1의 포트를 설정하고 속도는 default 500kbps에 맞춥니다.
Channels은 Accel과 Gyro를 추가 합니다. Transmitting에 Periodic을 추가하고 Periodic message를 그림과 같이 Add 합니다. CAN0으로 나갈수 있게 체크박스를 표기 합니다. (CAN1에서 받은 신호 CAN0으로 전송할 예정). Period는 100으로 설정해서 100ms 주기로 전송되게 합니다.
필터링(Filtering)을 진행하고 싶은 경우 CAN1에 Filter를 추가하면 됩니다. 이번 실습에서는 필터 값을 입력하지 않습니다.
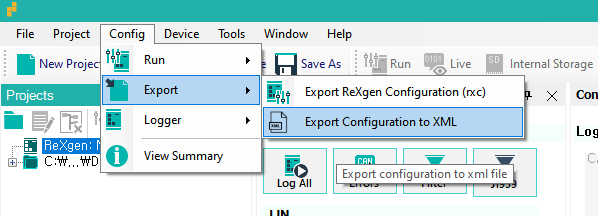
2. 아래와 같이 Config -> Export -> Export Configuration to XML을 사용해서 해당 구성을 XML 파일로 만들어 줍니다.
3. 앞서 만든 XML 파일을 XML Notepad로 열어 줍니다.
아래와 같이 CANMESSAGE는 3개로 구성됩니다. 3번째 메세지는 1번 과정에서 만든 Transmitting 메세지 입니다.
우선 MessageIdentStart와 MessageIdentEnd를 아래와 같이 0, 4294967295로 변경합니다. 이는 모든 범위의 메세지를 전송하겠다는 의미입니다.
다음으로 InputMessageUID를 7로 변경합니다. 이는 Port1로 들어오는 CANMEESAGE의 UID 7번을 가져오겠다는 의미 입니다.

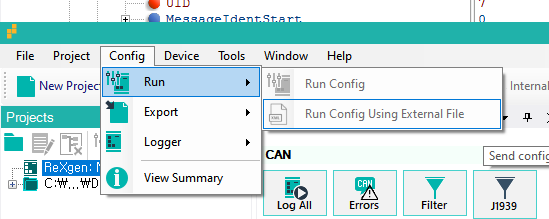
4. 앞서 설정을 마친 XML을 Config -> Run -> Run Config Using External File 을 통해 프로그램 합니다.
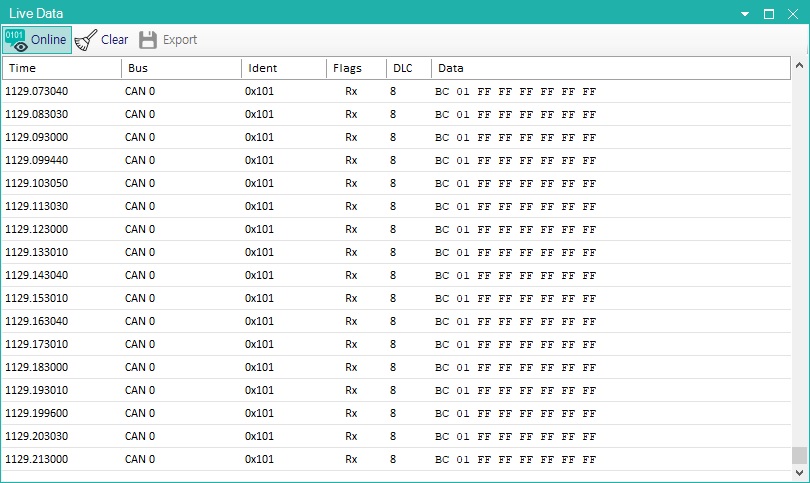
5. 실습 구성의 1번 ReXgen2 장비를 USB로 연결하고 CAN0을 Logging으로 설정해서 Upload를 진행후 Live로 2번 ReXgen2의 0번 포트로 신호가 아래와 같이 정상적으로 들어옴을 확인합니다.
Ident 0x101은 TC Logger에서 설정된 온도의 캔 메세지 아이디 값입니다.
CAN Port0에서 1 + IMU 신호 추가 실습
이번 실습은 앞서 실습 구성과 동일 합니다. 2번 ReXgen2 장치에 내장된 Gyro와 Accleration 센서의 값을 CAN Message로 추가해서 Port0으로 온도 신호와 함께 전송하는 실습니다.
1. 앞서 실습 구성해서 Channels에 Accel, Gyro 센서를 추가 합니다.
다음으로 Periodic 신호에 0x128, 0x129 아이디로 신호를 2개 추가 합니다. 온도 값을 보낼 신호까지 해서 총 3개의 출력 신호를 CAN0으로 보내는 구성을 만듭니다.

2. 앞서 실습의 2번, 3번 과정을 동일하게 진행합니다.
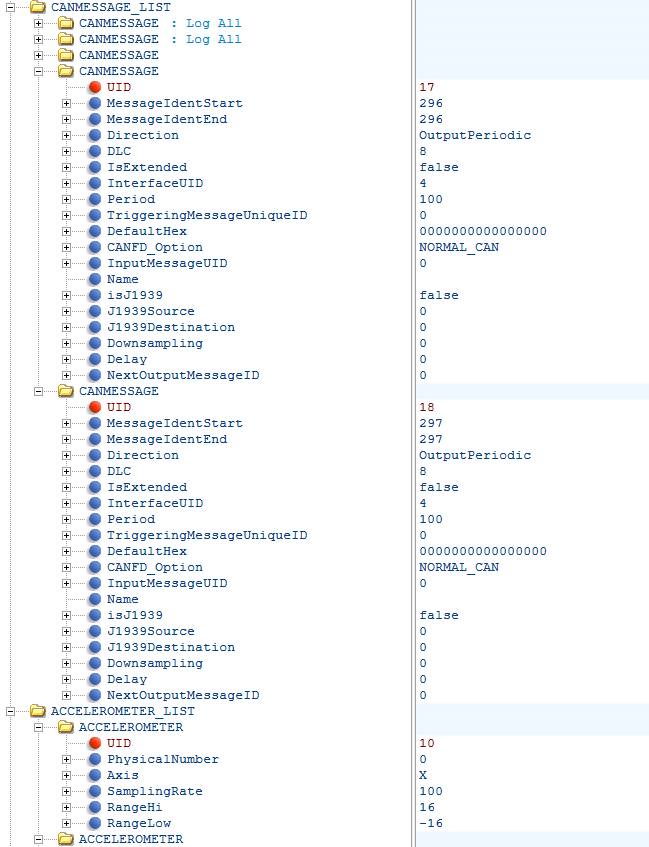
다음으로 아래와 같이 CANMESSAGE의 4번째와 5번째 UID 값 Acceleration의 UID 값을 기록 합니다.
이번 실습의 CANMESSAGE의 UID는 17, 18이고 Accleration의 UID는 10~12, Gyro의 UID는 13~15 입니다.
CAN UID 17은 ID가 296으로 Hex 값으로 0x128로 Acceleration의 ID로 사용 됩니다.
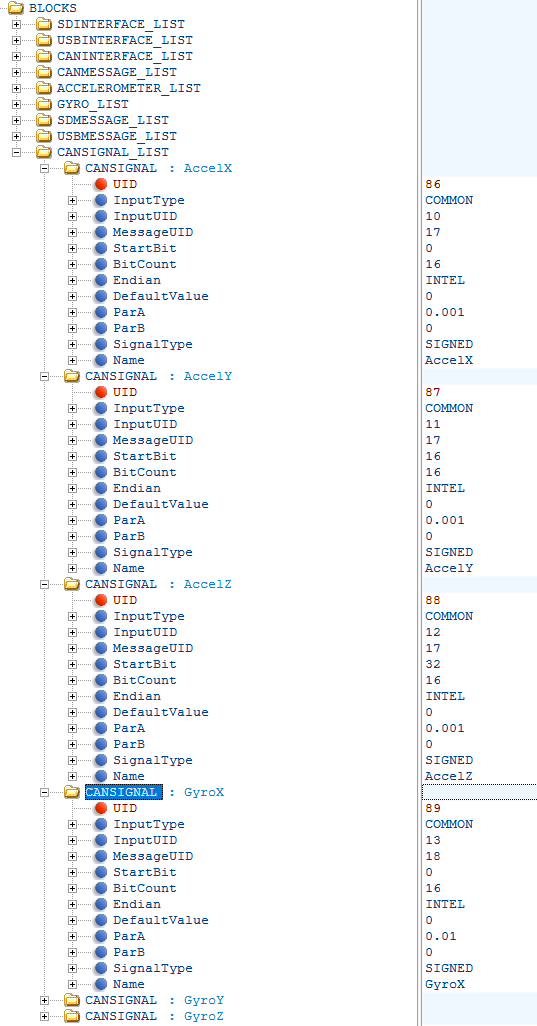
3. 아래와 같이 CANSIGNAL_LIST를 작성해야 합니다. 수작업으로 작성이 어렵기 때문에 글 하단의 XML 첨부 파일의 CANSIGNAL_LIST를 Copy - Paste로 붙여 넣습니다.
CANSIGNAL의 InputUID와 MessageUID를 앞서 2번 과정에서 기록한 UID 값을 입력 합니다. InputUID에는 CANMESSAGE의 UID를 넣고 MessageUID는 센서 각 각의 UID를 입력 해줍니다.
4. 이전 실습의 4번과 5번 과정을 동일하게 진행합니다.
아래와 같이 0x101의 온도 값과 0x128에서 가속도 값과 0x129의 자이로 센서 값이 들어 오는 것을 확인할 수 있습니다.

CAN 실습 파일 첨부
실습에 사용된 XML과 온도 DBC 파일입니다.
해당 내용과 관련해서 팜테크에서 교육 프로그램, 측정/분석 용역, 장비를 제공하고 있습니다. 관심 있으시면 아래 홈페이지 또는 연락처를 통해 문의 주시면 됩니다. :)
https://famtech.co.kr/sub04/01_01.php
교육일정및신청(주)팜테크
education schedule 교육일정및신청 HOME > 교육 > 교육일정및신청
famtech.co.kr




