

팜테크(FAMTECH)
캔통신과 이더넷통신(CAN Bus vs Ethernet Communication, 비교) 본문
캔통신과 이더넷통신(CAN Bus vs Ethernet Communication, 비교)
FAMTECH 2023. 11. 15. 11:08
목차

"관련제품 문의는 로고 클릭 또는 공지사항의 연락처를 통해 하실 수 있습니다."
캔통신(CAN Bus Communication)
CAN 버스(Controller Area Network)는 주로 자동차 응용 분야에서 사용되는 통신 시스템입니다. Robert Bosch GmbH에 의해 1983년에 발명되었으며, 1990년대 초반까지 자동차에서 완전히 기능하게 되었습니다. 이 시스템은 자동차 환경에서 중요한 실시간 제어 시스템에 초점을 맞추고 있습니다.
- 우선 순위 레벨(Priority Levels): CAN 버스는 5300만 이상의 우선 순위 레벨을 지원합니다. 이러한 광범위한 범위는 메시지의 우선 순위를 매우 세밀하게 제어할 수 있게 해, 가장 중요한 데이터가 먼저 전송되도록 합니다.
- Multi-Master Broadcast System: 단일 마스터 노드가 통신을 제어하는 시스템과 달리, CAN 버스에서는 어떤 노드(장치)도 통신을 시작할 수 있습니다. 이러한 설정은 멀티-마스터 시스템이라고 합니다. 노드가 메시지를 보낼 때, 특정 수신자에게만이 아니라 전체 네트워크에 방송(Braodcasting)됩니다.
- 속도 및 데이터 크기: 원래의 CAN 버스는 최대 1 Mbps의 속도를 지원하며, 새로운 버전인 CAN FD는 최대 10 Mbps까지 가능합니다. 이 속도는 현대 기준으로 비교적 느리지만, 의도적으로 설계된 것입니다. CAN 버스는 대량의 데이터 전송보다는 자동차 제어 시스템에서 중요한 작은 실시간 메시지 전송에 최적화되어 있습니다.
- 충돌 해결 및 버스 부하(Collision Resolution and Bus Load): 네트워크에서 두 노드가 동시에 전송할 때 충돌이 발생합니다. CAN 버스는 이러한 충돌을 해결하는 방법을 가지고 있으며, 지연 없이 100%의 버스 부하를 지원합니다. 이 능력은 데이터 일관성과 실시간 통신을 보장하며, 타이밍이 중요한 자동차 맥락에서 필수적입니다.
- 자동차에서의 사용: CAN 버스는 엔진 제어 장치, ABS, 에어백, 조명 시스템 등 다양한 전자 제어 장치(ECU)를 연결하는 데 널리 사용됩니다. 이 네트워크는 이러한 시스템들이 효율적으로 상호 작용하고 기능할 수 있게 합니다.
요약하자면, CAN 버스는 신뢰할 수 있는 실시간 통신에 중점을 둔 자동차 환경에 맞춰 설계되었습니다. 고속 데이터 전송보다는 제어 시스템에 적합합니다.
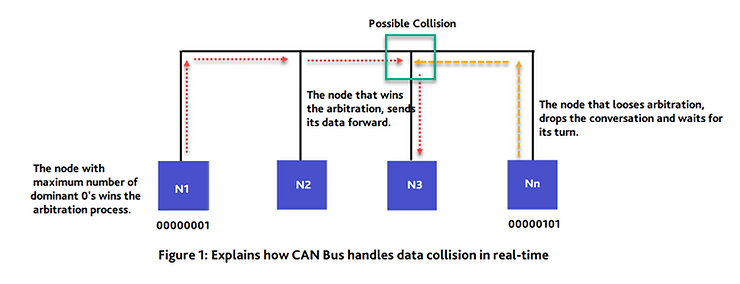
위 그림은 CAN BUS상에서 충돌 발생 시 중재(Arbitration)를 하는 과정을 그림으로 표현한 것입니다. 앞서 포스트에서 설명하였듯이 중재는 캔통신에서 전송하는 Arbitration bits의 Dominant "0"비트에 의해 결정 됩니다. 이를 통해서 중요도가 높은 신호를 우선적으로 전송할 수 있습니다.
자동차 통신에서 이더넷 통신(Ethernet)
이더넷(Ethernet)은 CAN 버스보다 훨씬 이전에, 1973년에서 1974년 사이에 Xerox PARC에서 개발되었습니다. 처음에는 3Mbps의 속도를 지원했지만, 지금은 최대 400Gbps까지 지원하는 매우 빠른 통신 프로토콜이 되었습니다. 이더넷은 로컬 영역 네트워크(Local Area Network, LAN)를 위한 유선 기술로, 장치들이 서로 통신할 수 있게 연결합니다.
이더넷은 동축 케이블, 꼬인 쌍선, 광섬유 케이블 등 다양한 유선 기술을 사용합니다. 이더넷은 포인트-투-포인트 통신만을 제공하는데, 이는 각각의 스테이션(장치)이 서로 데이터 패킷을 보내며 통신하는 것을 의미합니다. 각 스테이션은 고유한 주소를 가지고 구별됩니다. 송신지와 목적지의 주소를 사용하여 링크 수준의 통신이 이루어집니다. 수신자는 자신에게 주소 지정된 패킷만 받아들이고 나머지는 무시합니다.
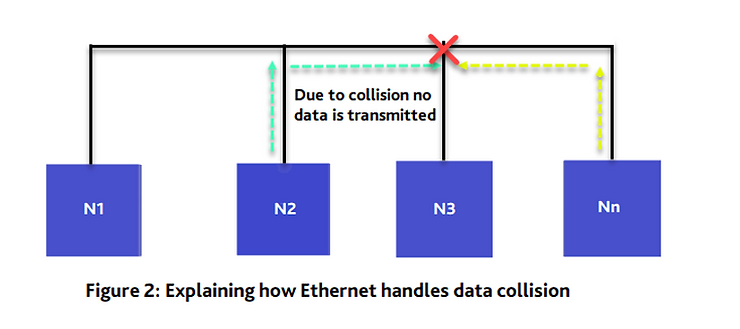
그러나 이더넷을 여러 노드에서 사용하려면 리피터, 라우터, 스위치 등을 설치해야 하며, 이는 인프라 비용을 증가시킬 수 있습니다. 이더넷의 또 다른 단점은 실시간으로 작동하지 않고 데이터 전송 간의 충돌을 처리하는 방법이 없다는 것(위 그림2 참조)입니다. 충돌이 발생하면 관련된 노드가 전송을 중단하고, 모든 노드가 대기 시간을 무작위로 늘리며 데이터를 다시 보내려고 시도합니다. 이것은 또 다른 충돌과 지연을 초래할 수 있습니다. 대기 시간이 무작위이기 때문에, 충돌을 실시간으로 수정할 수 있는 방법이 거의 없습니다. 스위치를 사용하면 각 포트가 별도의 충돌 영역을 나타내므로 이 문제를 해결할 수 있습니다.
따라서 이더넷은 충돌이 없을 때 효율적입니다. 그러나 버스 부하가 높으면 여러 충돌이 발생하여 대기 시간이 증가하고 지연이 상당히 증가할 수 있습니다. 이더넷은 트래픽을 라우팅하기 위해 스위치가 필수적이며, 스위치에 여유 포트가 없으면 노드를 추가하거나 제거할 수 없습니다. 노드는 버스에 직접 연결될 수 없습니다.
자동차 이더넷은 이미 사용되고 있으며, 미래에는 대역폭 요구 사항이 증가함에 따라 필수적인 요소가 될 것입니다. 예를 들어, 여러 카메라를 사용하는 ADAS(Advanced Driver Assistance Systems), 다수의 라이다 및 레이더 센서, 첨단 인포테인먼트 시스템은 엄청난 양의 데이터를 생성하며, 이 데이터를 고속으로 실시간으로 처리하고 최소한의 지연 시간으로 처리하기 위해서는 자동차 이더넷이 가장 적합합니다.
그러나 이더넷에는 단점도 있습니다. 물리적 계층 인터페이스가 더 비싸고, 스위치와 컨트롤러에 필요한 비용, UTP ( two-wire unshielded twisted-pair) 이더넷과 관련된 EMI 및 EMC 문제를 처리하는 복잡성 등이 포함됩니다. 또한, 이더넷 통신은 실시간이 아니며 비결정적입니다. 이러한 이유로 자동차 이더넷은 CAN을 완전히 대체할 수 없습니다.
캔통신과 이더넷통신 비교 분석(Comparison Table)
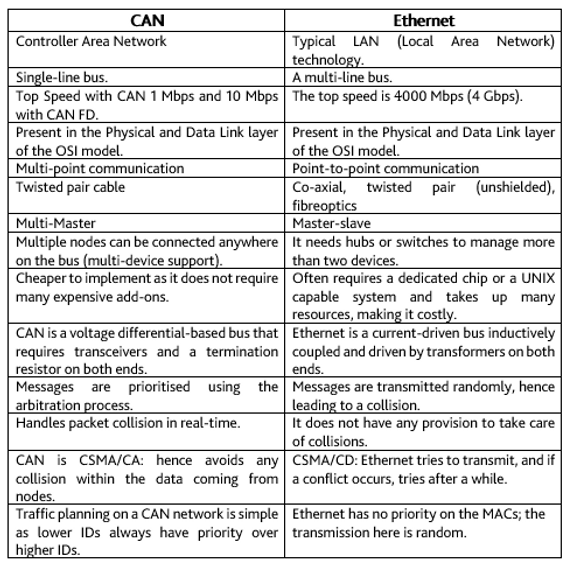
CAN 버스와 이더넷을 경쟁 기술로 보기보다는 서로 보완하는 기술로 보는 것이 현명합니다. 자동차 산업에서는 이미 두 기술을 함께 사용하여 큰 이점을 얻고 있습니다. 자동차가 더욱 고도화되고 첨단화됨에 따라 센서, 카메라, 인포테인먼트 시스템 등에서 생성되는 데이터 양이 증가할 것입니다. CAN과 이더넷은 고급 전자 제어 장치(ECU)를 처리하는 데 서로 보완적인 역할을 할 수 있습니다.
팜테크에서는 Influx사의 CAN BUS 통신 관련 제품 및 교육을 제공하고 있습니다. 해당 제품에 관심이 있으시다면 아래 연락처 또는 홈페이지에 문의 남기시면 됩니다. :)




